“Mini Rover” puede moverse y gatear en terrenos difíciles en otros planetas

Pero ‘Mini Rover’, un modelo conceptual más pequeño, impreso en 3D de la NASA, construido y probado por científicos del Instituto de Tecnología de Georgia, tiene una marcha que le permite gatear y conquistar con éxito terrenos difíciles.
Sus orígenes se remontan a 2009, cuando el rover Spirit de la NASA se atascó en un suelo blando en Marte y no pudo ser movido. Fue utilizado como una plataforma científica estacionaria durante tres meses hasta que el vehículo dejó de comunicarse en marzo de 2010. La misión terminó oficialmente con la NASA en 2011.
El suelo granular suave, llamado regolito, funciona casi como un líquido cuando se altera en Marte, lo que significa que es más fácil quedarse atrapado en él. (La luna tiene un suelo similar).
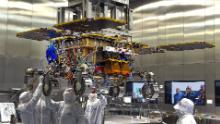
Después de perder el Espíritu, los ingenieros de la NASA en el Centro Espacial Johnson en Houston construyeron un vehículo explorador de la misión Resource Prospector, o RP15 rover.
El concepto incluía un rover que permitía que la rueda girara junto con el movimiento de barrido y barrido del rover. Pero la misión en sí fue cancelada en 2018.
Con el respaldo de la Iniciativa Nacional de Robótica de la NASA y la Oficina de Investigación del Ejército, los científicos de Georgia Tech propusieron construir y probar una versión en miniatura del rover hecho de plástico impreso en 3D. Llamaron a este pequeño RP15 Mini Rover.
“Nuestro principal objetivo de diseño era recrear la funcionalidad de la unidad RP-15 en un robot más pequeño que pudiéramos trabajar en nuestro banco de pruebas instrumentado”, dijo Siddharth Shrivastava, autor de la investigación y estudiante de pregrado en Georgia W. Georger Woodruff School of Mechanical Engineering, en e- correo electrónico a CNN.

Aunque el robot no es una réplica exacta de un rover más grande que tiene motores encerrados en un diámetro de rueda y una mayor relación potencia / peso, el equipo de Georgia Tech pudo reproducir los movimientos de elevación, barrido y giro de la rueda. Estos movimientos fueron cruciales para sus pruebas. Su modelo, construido con impresoras 3D internas, tiene cuatro patas sobre ruedas que funcionan con 12 motores.

Cuando el robot se ensambló en Georgia Tech, llegó el momento de probar el Mini Rover en camas de amapola planas e inclinadas. Aunque no son exactamente análogos a las superficies que los rovers pueden encontrar en otros planetas, las semillas de 1 milímetro de grosor tienen muchas características que las hacen adecuadas para experimentos.
“Las semillas de amapola son una base granular bastante útil para experimentos de laboratorio con robots”, dijo Andras Karsai, coautor del estudio y estudiante de doctorado en la Facultad de Física de Georgia Tech, en un correo electrónico a CNN.
“Son lo suficientemente suaves como para aplastarse de forma segura entre las juntas móviles del robot si se atascan y no producen polvo dañino”.
Pruebas de movimiento
Los científicos comenzaron sometiendo al Mini Rover a las mismas pruebas de movimiento que RP15 experimentó en el Centro Espacial Johnson, y también exploraron los rangos de movimiento que solo un rover más pequeño podría realizar debido a su pequeño tamaño.
Si solo se activaran las ruedas, el robot se deslizaría sobre la amapola y se caería. Cuando se agregaron las patas de barrido de las patas del robot, el Mini Rover pudo usar este método único de movimiento para salir de la amapola mientras se movían de manera impredecible. Como resultado, el rover no se hundió más, creando montículos de semillas, para poder escalarlo.
Este movimiento circular, de barrido y elevación creó un movimiento de arrastre exitoso para el rover, incluso cuando una de sus extremidades fue desactivada intencionalmente. Esta indexación fue llamada por los científicos “pedaleando el rotador trasero”.
“Cuando fluyen materiales sueltos, puede causar problemas a los robots que se mueven”, dijo en un comunicado Dan Goldman, coautor de investigación y profesor de la familia Dunn en la Facultad de Física del Instituto de Tecnología de Georgia.

“Este rover tiene suficientes grados de libertad que puede salir del atasco con bastante eficacia”. Gracias a la avalancha de materiales de las ruedas delanteras, crea una colina suave y local para las ruedas traseras, que no es tan empinada como una pendiente real “.
El cierre individual de levantar, barrer o girar la rueda dificultó al rover. Pero la combinación de los tres creó el mejor rendimiento y la resistencia reducida.
“Fue un experimento elegante con resultados claros: era necesario combinar los tres sistemas”, dijo Shrivastava.
Lo mismo era cierto cuando inclinaban el suelo para simular un rover trepando empinadas colinas planetarias.

El rover podía subir la colina con éxito cuando sus ruedas delanteras movían las semillas de amapola y las empujaban hacia las ruedas traseras, y las ruedas traseras se balanceaban lateralmente con el remo. Esto creó una pendiente más pequeña para que subieran las ruedas traseras.
“Interferir con los medios granulares es en realidad la clave para el rendimiento del robot”, dijo Karsai. “Al mezclar constantemente los medios granulados con las ruedas, el robot crea un fluido de fricción localizado a través del cual puede” gatear “efectivamente.
“En superficies inclinadas, este movimiento ayuda a una avalancha de medios en montículos locales, desde los cuales el robot rover puede empujar. En resumen, el enfoque “robofísico” ha dado muchos resultados sorprendentes que no podríamos haber predicho basándonos solo en el modelado “.
En general, el rover pudo continuar la rampa. Pero un robot que solo gira se quedaría atascado.
Estas pruebas también se llevaron a cabo en el Centro Espacial Johnson con el rover RP15 de tamaño completo conduciendo sobre un sustrato de arena plano y húmedo, y obtuvieron los mismos resultados que para el Mini Rover.
En el futuro, los ingenieros quieren probar el RP15 más grande y el Mini Rover en pendientes más pronunciadas, en diferentes suelos y terrenos para probar una mayor funcionalidad. También quieren agregar detección de terreno local, que puede ayudar al rover a detectar su entorno. Shrivastava también es interesante locomotora cuesta abajo.
Los investigadores dijeron que las oportunidades demostradas en el estudio podrían usarse para desarrollar una nueva generación de vehículos exploradores que podrían visitar áreas previamente inexploradas, como los polos lunares e incluso lugares difíciles en la Tierra.
“El trabajo descrito en este artículo apoya el diseño de rovers para acceder a suelos empinados y blandos en los que podrían existir muestras y materiales científicamente interesantes”, Robert Ambrose, coautor de investigación y jefe de software, robótica y simulación en el Centro Espacial Johnson de la NASA. .
“Para la exploración de la Luna, que consiste en entrar en cráteres oscuros y regiones que están sombreadas permanentemente en los polos de la Luna. Para Marte, esto podría significar operar en arenas blandas y otros depósitos traicioneros para los rovers “.
“Personalmente, estoy feliz de que estas estrategias se estén adaptando fuera del laboratorio como parte de grupos de ingeniería que desarrollan plataformas de movimiento para la Luna, Marte y más”, dijo Shrivastava. “Además de los vehículos de transporte de nuestra especie, creo que la locomoción extraterrestre sólida servirá como base para el asentamiento futuro de personas fuera de nuestro planeta”.